
森林动态监测中基于多传感器低空遥感影像配准的空间坐标校正
背景
森林管理可以有效地改变森林生境的结构并影响其生物多样性。然而,人类活动、土壤侵蚀、虫害和自然灾害正在导致树种多样性急剧下降。因此迫切需要采用轻量化、低成本的动态监测技术,以实现不同时间尺度上的森林动态监测。
随着航空遥感技术的不断进步,利用航空影像对树种多样性进行动态监测是一种有效的方法。与使用飞机或卫星相比,小型无人机(Unmanned aerial vehicle, UAV)可以更便宜和更快速地获取目标信息,特别是在需要更高的时间分辨率的情况下。为获得更多的树种理化信息,通常会在UAV上搭载RGB或多/高光谱传感器。
虽然利用小型UAV进行树种多样性监测具有灵活性强、效率高、操作方便、成本低等优点。但仍存在以下问题,阻碍了进一步的研究:(1)机载推扫式高光谱成像仪与机载可见光相机相比,成像范围小,分辨率低,难免导致影像拼接效率低,成本高,*终结果几何误差大;(2)由于成像视角容易受到风速、方向、复杂地形、电池容量、飞机姿态、飞行高度等因素影响,拍摄的同一场景影像往往伴有多视点。这些视点直接用于拼接,会造成拼接影像拉伸和几何形变;(3)小型无人机高光谱成像系统出于重量和成本的考虑,往往无法搭载高精度、高采样频率的定位系统;(4)高光谱影像拍摄时的高度重叠,容易导致工作效率低下。上述问题导致小型UAV捕捉的高光谱影像难以提供**的森林动态监测。
本研究提出了一种将低空可见光和高光谱影像**对齐到地理坐标系中的方法,以减小高光谱影像的位置误差。该方法首先利用可见光图像和地面控制点拼接出一个地理坐标系统作为参考值。然后,采用一种新颖的图像配准方法将高光谱影像配准到拼接后的可见光影像上。*后,利用上述参考值将高光谱影像的空间坐标更新到合适的位置。本研究可大大提高高光谱影像采集效率,避免了高度重叠数据的采集。
试验设计
研究区域位于上海辰山植物园的1300 m2森林地块。云南师范大学杨扬教授团队利用小型无人机DJI Phantom4 Pro获取了20张可见光影像(Visible light image, UVI),并将拼接后影像的地理坐标系统作为参考值。并且利用搭载有Gaiasky-Mini2-VN高光谱成像系统(江苏双利合谱公司)的大疆M600 pro无人机获取了对应森林的高光谱影像(Hyperspectral images, UHI)。其波段范围为400-1000 nm,通道数为176。
空间坐标校正的过程包括三个主要步骤:(1)地理坐标系确定;(2)图像配准;(3)空间坐标校正(图1)。
首先,利用高分辨率的UVI和地面控制点来拼接一个地理坐标系作为参考值,并根据拼接后的UVI中的高光谱图像选择合适的区域(UVR)。
其次,在获取参考值后,利用UVR对UHI进行图像配准。图像配准的目的是对高光谱影像进行变换,使其与目标影像UVR对齐。将UHI在更**的地理坐标上对齐,以实现树种的定位。主要分为以下三步:(1)特征点提取。在基于特征的方法中,特征提取是点集配准的关键。本研究采用基于SIFT-like scale space(EOH-SIFT)的Edge Oriented Histogram descriptor(EOH)进行特征点集提取;(2)特征点集配准。采用期望*大化(Expectation maximization, EM)算法来完成图像配准过程,该过程在两步之间交替进行。EM算法的这两步分别对应于对应估计和变换更新;(3)图像变换。为了解决图像的几何畸变和非刚性畸变,我们利用薄板样条插值(Thin plate spline, TPS)来模拟更广泛的变换。
文中使用的EOH-SIFT算法是一种特征点描述符,用于在同一场景的RGB图像上匹配特征集。首先,通过类似SIFT的尺度空间表示法检测特征集,然后用EOH来表示这些特征集,得到80维的向量作为EOH-SIFT描述符,如图2所示。
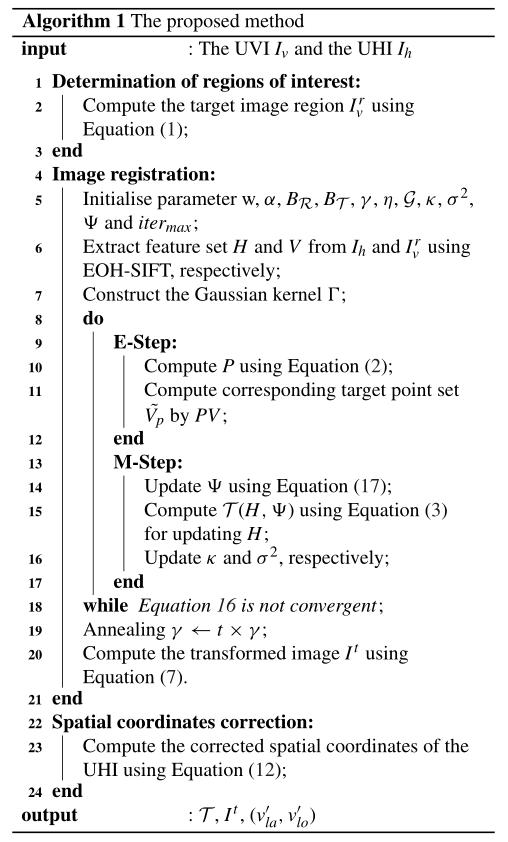
文中提出了自动调整高斯核,通过控制特征点集的位移距离,将变换函数从刚性逐步更新为非刚性。这个内核的思想是发挥从粗到细的搜索策略。具体算法流程如下所示。
*后,经过图像变换,可以将UVR的空间坐标**地叠加在UHI上。然后,对于UHI的每个像素,我们可以得到它的地理坐标。
为了验证所提出的配准方法的优越性,将本研究的方法与相干点漂移(CPD)、用薄板样条变换的全局和局部混合距离(GLMDTPS)、全局-局部对应和变换估计(GLCATE)以及保存全局和局部结构(PRGLS)这四种方法进行比较。

图1 空间坐标校正的过程
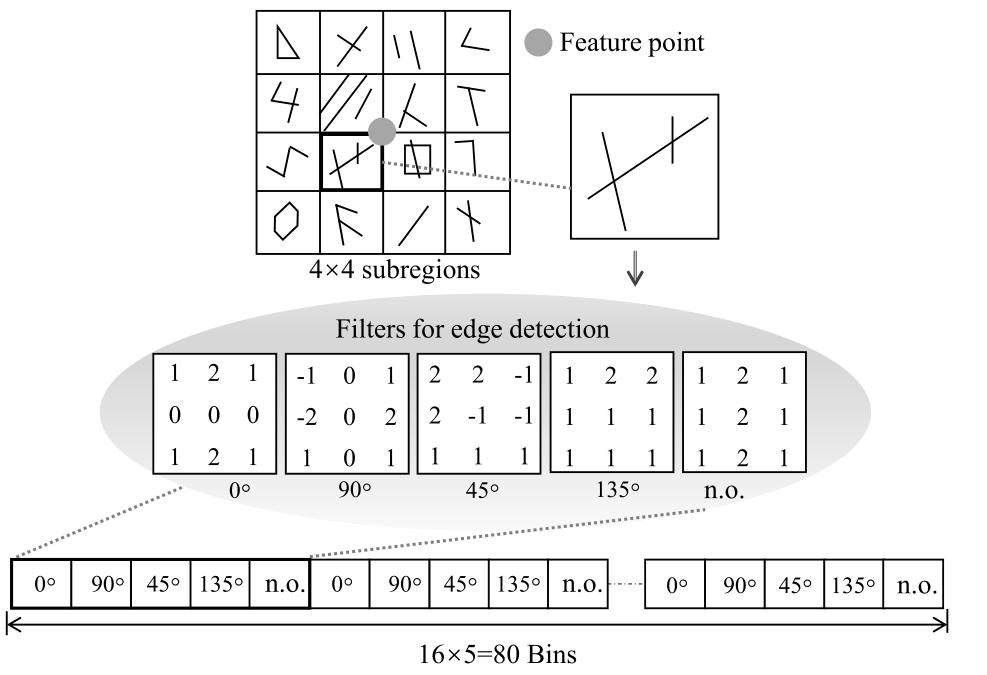
图2 EOH-SIFT描述符的说明
结论
每种方法在25对影像上的RMSE、MAE和MAD如表1所示。5个典型配准示例如图3所示。判定配准失败的方法有两种:(1)变换后的影像失真严重,无法人工识别;(2)RMSE大于160像素。我们的方法在所有影像配准实验中提供了*好的性能,特别是当这些影像在不同的成像传感器间有较大的强度变化时。CPD通过使用均匀分布以拒绝异常值来缓解这个问题。GLMDTPS性能很差,因为它强制一一匹配,这很容易受到异常值的影响。PRGLS受到类似几何邻域结构产生的错误匹配。与其他三种方法相比,GLCATE算法性能较好,但对多时相影像不敏感。本研究方法优于其他四种方法的主要原因是:(1)采用双特征描述子组合,能够更准确地识别两个特征点;(2)利用识别出的特征点在重叠区域和非重叠区域通过粗到细变换对弯曲网格进行近似整形。
表1 不同图像配准方法的定量比较

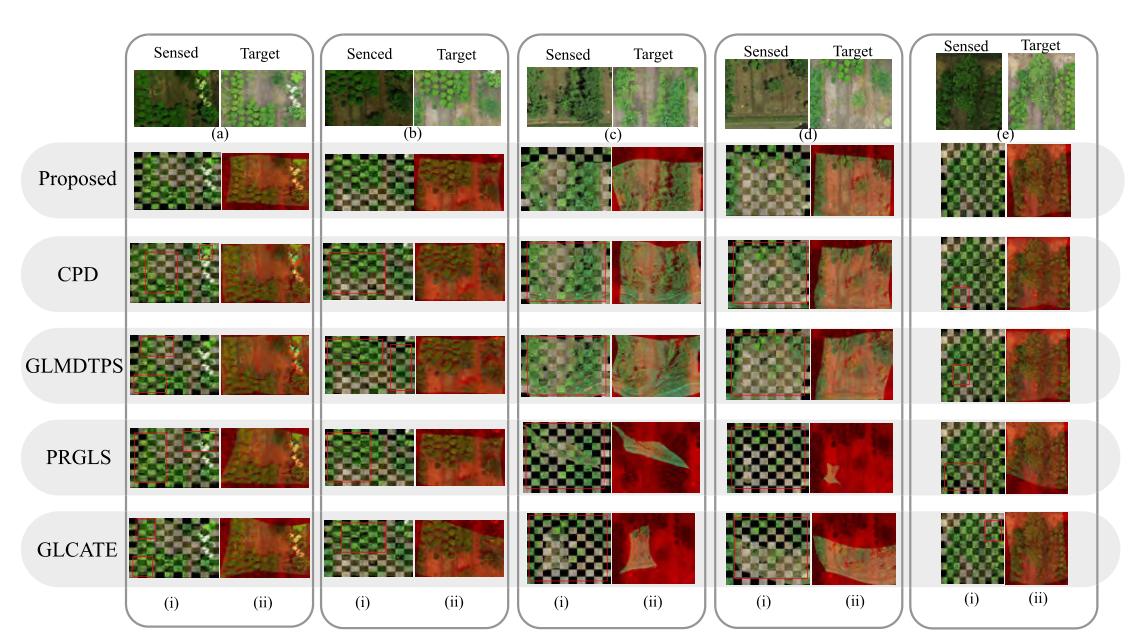
图3 不同配准方法示例。(i)为每个示例的10 × 10校准板,其中使用红色矩形突出显示配准错误;(ii)为重叠面积
UHI和校正后的坐标的平均距离误差为2.92 m,但采用本研究方法后,单个UHI的误差减少到约1米(表2)。由于每个UHI只有一个地理坐标,当我们拼接大量的高光谱影像时,这些误差会累积起来,对单个树木分析的准确性影响很大。
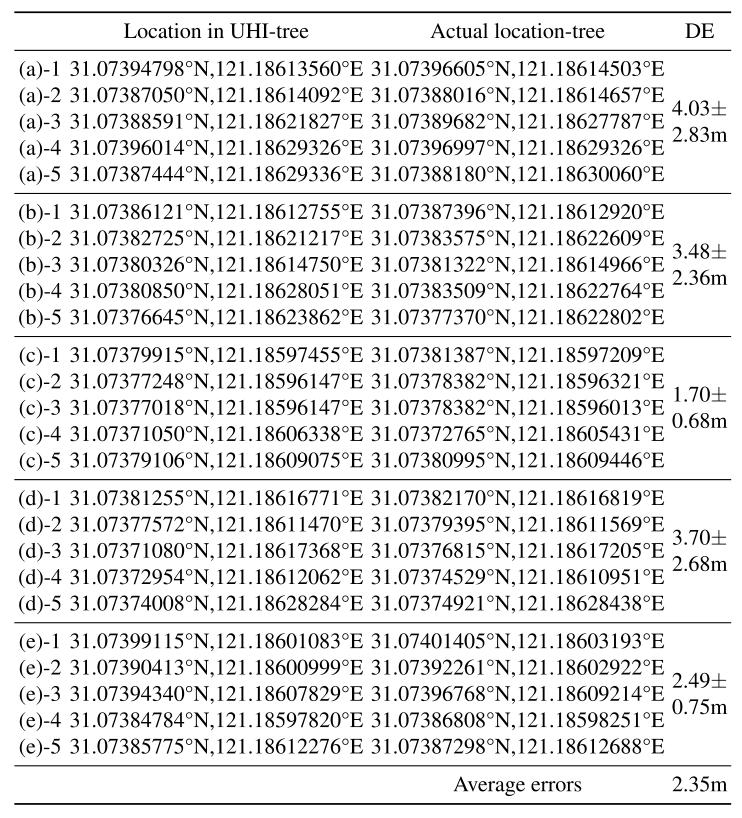
UHI中的坐标是从PHOTOMOD软件拼接后的高光谱影像中获得的,其误差具有累积效应。如表3所示,UHI坐标与实际坐标之间的平均距离误差为2.35 m。本文方法可以有效地将校正率提高到62.97%。试验结果表明,该方法能够在大多数时间内成功地解决基于小UAV的多传感器影像的空间坐标校正问题,为监测物种多样性提供了巨大的可能。
表2 校正后的坐标与实际坐标的对比结果
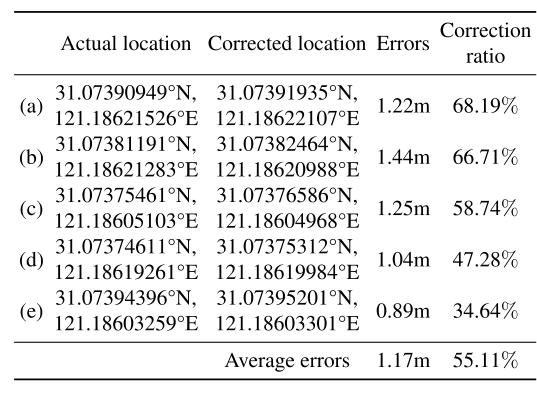
表3 单棵树在UHI中的坐标与实际坐标的比较结果。DE表示偏离误差
作者信息
杨扬,博士,云南师范大学信息学院教授,博士生导师。
主要研究方向:遥感影像配准。
参考文献:
Yu, R., Lyu, M., Lu, J., Yang, Y., Shen, G., & Li, F. (2020). Spatial Coordinates Correction Based on Multi-Sensor Low-Altitude Remote Sensing Image Registration for Monitoring Forest Dynamics. IEEE Access, 8, 18483-18496
https://ieeexplore.ieee.org/document/8964383
